

{kind=link}
{kind=link}
MAPTEK I-Site 8200ER三维激光扫描仪测角精度研究
[李泽邦 , 夏永华
, 夏永华* , 柏宏强]
, 夏永华, 柏宏强]
|
|


作者简介:李泽邦(1991—),男,湖南长沙人,硕士研究生,研究方向为三维激光扫描系统检校与点云数据处理,E-mail:45475056@qq.com。
采用MAPTEK I-Site 8200ER三维激光扫描仪与拓普康GPT-3002LNC全站仪为实验设备,在同种距离条件下,分别获取扫描数据和全站仪观测数据,将全站仪的观测角度值作为基准,MAPTEK I-Site 8200ER 三维激光扫描仪观测的数据反算的角度作为观测值,建立平差模型,通过最小二乘法解算扫描仪的水平角和垂直角精度。研究结果表明,MAPTEK I-Site 8200ER三维激光扫描仪测角精度符合标称测角精度。
三维激光扫描技术是一种先进的全自动高精度立体扫描技术[1], 具有获取数据速度快、精度高、全自动化、全天候作业等特点, 已成为空间数据获取的重要技术手段。三维激光扫描仪在测绘、建筑、医学、生物等领域有着广泛的应用。然而, 三维激光扫描仪的精度指标都是生产厂家提供的, 国内尚未出台统一的检校标准。杨长强等[2]设计一种标志点用于扫描仪检定; 张毅等[3]建立三维激光扫描系统误差模型, 并对其正确性进行了验证; 谢宏全等[4]对徕卡C10三维激光扫描仪的水平角精度检校进行研究; 张启福等[5]提出一种新的三维激光扫描仪测角精度评定方法; 王玉鹏等[6]对徕卡Scanstation 2型三维激光扫描仪点位精度评定进行研究。在此基础上, 本研究拟对三维激光扫描仪的水平角和垂直角分别进行实验研究。
采用澳大利亚MAPTEK公司生产的I-Site 8200ER三维激光扫描仪作为待测仪器, 其最大测程为500 m, 测角精度为10″。根据实验精度要求, 选择拓普康GPT-3002LNC全站仪作为基准仪器, 其测角精度为2″。辅助试验设备包括自制圆形黑白平面标靶、工业脚架、卷尺。
根据实验目的, 选择昆明理工大学田径场作为检校场, 以全站仪测量的角度值作为基准值, 将扫描仪点云坐标反算出的角度作为观测值。考虑轴系误差的影响, 建立角度平差模型, 通过解算, 与标称精度进行对比。
选择田径场一竖直墙面, 在距离墙面约5 m处设定一点P, 将拓普康全站仪架设在P点上, 对中整平后设置直角为0° , 沿水平方向布设5个平面黑白标靶, 各标靶中心距离约为0.6 m, 水平方向标靶从左到右编号依次为A1、A2、A3、A4、A5, 如图1所示。
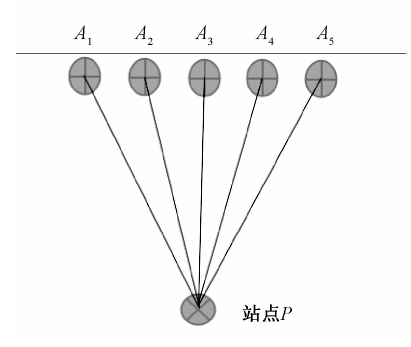 | 图1 水平角精度检校场 |
在距离墙面5 m处设定一点S, 沿墙面垂直方向布设4个平面黑白标靶, 各标靶之间距离约为0.6 m, 标靶从上至下编号为B1、B2、B3、B4, 如图2所示。
 | 图2 垂直角精度检校场 |
1.3.1 水平角精度检定
将拓普康GPT-3002LNC全站仪架设在标靶区域正前方5 m处, 采用全站仪方向观测法测量各标靶中心的水平角, 记录在观测表上。计算一测回方向值M=(L+R± 180° )/2, 再算出相邻两方向水平夹角
写成误差方程:
V=BX-L, 即vi=(-1/cos
通过间接平差原理计算出轴系误差c和ω , 代入平差模型求出改正数vi, 即可求出水平角角度中误差mφ 。
1.3.2 垂直角测角精度检定
将全站仪架设于标靶区域正前方5 m处, 用钢卷尺量出仪器高度, 随后观测4个标靶中心垂直角度, 计算一测回方向值N=(R-L-180° )/2后, 解出相邻两标靶中心的垂直角夹角
写成误差方程:
vi=(-1/cos
根据全站仪中心、扫描仪中心和标靶中心三点形成的三角函数关系, 得出以下方程组:
得到:
β 'i=Ni-arcsin(lsinLi/Di)。
其中, l为全站仪和扫描仪之间的高差, Ni为全站仪观测垂直角。根据间接平差最小二乘法求出c、ω , 代入误差方程求出改正数vi, 进而求出垂直角度中误差mβ 。
利用全站仪观测3个测回, 取平均数, 计算出水平夹角基准值(表1)和垂直夹角基准值(表2)。
| 表1 水平夹角基准值 |
| 表2 垂直夹角基准值 |
利用三维激光扫描仪获取的水平角夹角和垂直夹角的观测值如表3、表4所示。
| 表3 水平夹角观测值 |
| 表4 垂直夹角观测值 |
由实验数据可解算出水平角测角中误差mφ =7″, 垂直角测角中误差mβ =7″。
本研究在布设测角精度检定场时, 采用全站仪分别沿水平方向和垂直方向布设平面标靶, 有效地减小了竖直角和水平角对实验结果的影响, 解算出MAPTEK I-Site 8200ER三维激光扫描仪水平测角精度为7″, 垂直角测角精度为7″。符合仪器标称精度(12″), 能够满足实际测量需求。影响三维激光扫描仪测角精度的因素有很多, 本研究只进行了短距离的实验, 并且选在室外场地进行。鉴于光照、温度等外界因素也会对数据精度造成影响, 因此, 各因素对测角精度的影响还需要进一步深入研究。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|