

{kind=link}
{kind=link}
基于全球导航定位系统的滑坡变形监测分析与灰色模型预测研究
[王倩 , 董燕
, 董燕* , 宁德怀]
, 董燕, 宁德怀]
|
|


作者简介:王 倩(1995—),女,云南曲靖人,硕士研究生,研究方向为地理信息技术与开发应用,E-mail:LeilaWangChina@163.com。
云南省是地质灾害频发的省份,尤其是地震等引发的滑坡、堰塞湖等次生灾害,造成大量人员伤亡及财产损失。以GNSS技术为监测手段,运用其可大面积监测、无须通视并可获取高精度数据的优点来获取滑坡的位移变形数据,通过对数据的处理及位移变形分析,判断滑坡变形趋势是否正常;另选取一部分数据为原始值,采用一阶一元灰色预测模型GM(1,1)对滑坡区作位移变形预测分析。结果表明,GNSS监测技术在大范围地区的滑坡监测中具有良好的效果,GM(1,1)模型预测结果与实测数据的检验值精度优良,预测效果较好。
滑坡等自然灾害给人民生活带来了巨大的痛苦和损失, 因此, 对滑坡等自然灾害进行监测和预防预测就显得尤为重要。传统的测量方法对于滑坡面积较大、地势较危险的地方很难实现有效的监测[1]。全球导航定位系统(GNSS, global navigation satellite system)是指利用卫星对地面上的用户进行导航定位的技术, 是天空中所有导航卫星系统的总称, 包括美国的GPS、俄罗斯的GLONASS、欧盟的Galileo和中国的北斗卫星导航系统, 具有可接受卫星数量多、精度高, 数据采集速度快、效率高, 观测站不需要通视, 选点方便, 不受天气影响, 观测时间短, 劳动强度低, 自动化程度高等优点, 尤其在测区比较危险和作业难度较大的地震滑坡区域, GNSS优势更加明显, 备受研究人员的青睐。目前, 国内外对GNSS技术多采用双系统、三系统融合使用, 以提高监测精度和效率[2]。如胡俊等[3]用BFGS算法融合InSAR和GPS监测地表三维形变, 既提高了监测精度, 又实现了地表三维形变监测。
灰色系统是我国著名的学者邓聚龙于1982年提出来的, 是指通过少量的、不完全的信息, 建立灰色微分预测模型, 对事物发展规律做出模糊性的长期描述。多年来, 灰色系统已被应用到许多领域并取得了很好的作用。李日云等[4]在灰色预测模型在高层建筑物沉降预测中的应用研究中详细讨论了GM(1, N)和GM(1, 1)的建模原理, 并将GM(1, 1)运用到高层建筑物沉降预测中, 证明一阶一元灰色预测模型GM(1, 1)在沉降预测中具有较好的应用价值。用于变形监测数据分析和预测的模型很多, 容静等[5]提出了1种基于小波的GM(1, 1)-AR模型, 不仅有效剔除了多余噪声, 还利用各种模型有机嵌套组合实现优势互补, 预测结果比各单一模型、非线性GM(1, 1)-AR模型结果更为精确。
鲁甸县位于云南省东北部、牛栏江北岸, 地势东西两侧高, 中间低平, 地貌错综复杂, 地壳活跃, 是地震灾害易发区域。2014年8月, 鲁甸县发生6.5级地震, 震源深度12 km, 之后又发生过几次4级左右的余震, 震源深度平均10 km, 地震灾情非常严重。地震发生后, 国家和云南省相关部门及专家为防止次生灾害发生展开了紧张的讨论和部署, 决定对滑坡最严重的红石岩堰塞体左右岸边坡和库区的珍珠泉崩塌体进行监测。本研究以此作为研究对象, 基于GNSS进行滑坡变形监测, 并利用灰色模型进行相关预测, 以期为类似研究提供参考。
GNSS技术监测点的布置一般分为观测点布置、圈定监测范围, 观测网形成、局部加强监测, 加深、加密布置观测点3个步骤。考虑到地震的影响范围较广, 震后容易引起余震, 加之强降雨导致滑坡更加不稳定等危险因素, 为保证仪器和测量人员安全, 所以采用设备比较完善、轻便且一体化的仪器对滑坡体进行非接触式变形监测。在红石岩滑坡段右岸崩塌体开口线以上的自然边坡上, 埋设6个GNSS测点(配1套基准点), 建立自动化监测系统, 监测范围监测点布置图见图1。
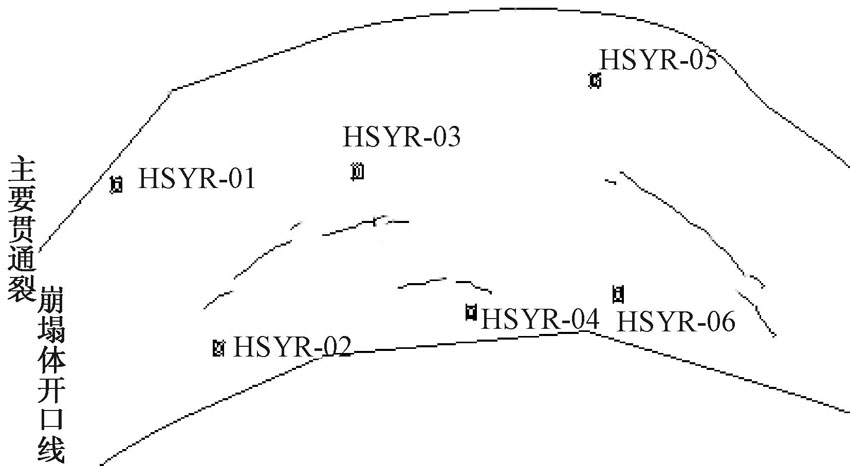 | 图1 监测区域的监测点分布 |
监测过程中, GNSS变形监测数据的采集频次为1 Hz, 测值解算时间采用2、4、6、24 h间隔。依据《崩塌、滑坡、泥石流监测规范》, 提出各工程监测项目的监测精度:岩质滑坡, 水平位移点位中误差, 6 mm, 垂直位移高程中位差, 3 mm, 地表裂缝中位差, 0.5 mm; 土质滑坡, 水平位移点位中误差, 12 mm, 垂直位移高程中位差, 10 mm, 地表裂缝中位差, 5 mm。研究仅对滑坡的位移变形进行分析, 不考虑裂缝的变化情况。
设实际监测的滑坡变形值满足非负数列, X(0)={x(0)(1), x(0)(2), …, x(0)(n)}。对X(0)做光滑比检验, P(n)=x(0)(n+1)/x(0)(n), 0.135< P(n)< 7.389, 然后做一阶累加生成新数列, X(1)={x(1)(1), x(1)(2), …, x(1)(n)}, x(1)(k)=
Y=
B=
然后对一阶累加数列X(1)建立一阶微分方程:
u=
利用公式计算a和u:
然后计算预测值:
最后计算残差
e(k)=x(0)(k)-
δ =e(k)/x(0)(k)。
灰色模型GM(1, 1)精度用方差比和小误差概率来检验。设
得到方差比C和小概率误差P:
C=S2/S1;
P={
为了使研究更清楚, 便于分析滑坡的变形趋势, 以牛栏江上游为X轴的正方向, 指向左岸为Y轴的正方向, 垂直于平面方向做Z轴的正方向, 以右岸的6个观测点为主要基础数据, 采用6个点2015年1月3— 9日的数据进行整理、统计和分析。GNSS右岸6个监测点的位移统计结果见表1, 右岸测点3的位移变形中位差数据见表2。
| 表1 监测点位移的情况 |
| 表2 位移变形中位差的情况mm |
从表1、表2可以看出, X、Y、Z方向周变化量最大的分别为测点HSYR03的5.2 mm、HSYR02的2.2 mm和HSYR06的8.0 mm, 最小的分别为HSYR01的0.3 mm、HSYR01的-3.6 mm和HSYR01的-29.2 mm。在周变化率上, 横向变化最大的是HSYR03测点, 0.7 mm· d-1, 变化最小的是HSYR05和HSYR06, 均为0.2 mm· d-1; 竖向变化最大的是HSYR01测点, 4.2 mm· d-1, 变化最小的是HSYR04测点, 0.1 mm· d-1。结合中位差数据分析可知, 水平位移和竖直位移都在精度范围内, 说明在监测时间和区域范围内, 滑坡的位移变形趋于稳定, 属于正常变形。
对比各测点X、Y、Z向2周的位移变化量, 可以看出, X向和Y向的变化很小, 说明GNSS测点的滑坡部位变形正常, 虽然竖直方向上的HSYR01和HSYR03变化稍微偏大, 但采用GNSS技术监测得到的竖直方向的数据一般精度比横向低1倍, 所以可判断出在竖向上位移变化也未出现异常, 属于正常变形。
位移过程线指的是在监测时段内, 所发生的位移随时间变化的情况, 本文主要以测点2和测点5为研究对象, 分别采用测点HSYR02的2014年8月29日至2015年6月5日和测点HSYR05的2014年9月4日至2015年9月4日位移数据, 求其平均值, 绘制过程线。考虑到竖向的精度问题, 竖向取值的1/2进行分析。从图2可以看出, 3个方向上的位移随时间的变化趋势都较小, 都在精度允许的变化范围内。
取通过GNSS监测得到的测点HSYR02的5组数据为原始数据(时间为每天12:00), 由于Y向和Z向数据存在负值, 因此在原始数据的基础上统一加10 mm, 再运用MATLAB软件建立灰色模型, 结果见表3。好的预测模型, 方差比(C值)越小越好, 一般要求C< 0.35, 最大不超过0.65, 小误差概率(P值)越大越好, < 0.7则说明预测效果较差[4]。经测算, X、Y、Z向上的位移在模拟之后与原始值的小误差概率均为100%, 模型精度大于95%, 效果很好; 方差比分别为23%、37%和28%, X、Z向的模型精度很好, Y向上的模型精度在35%~50%, 精度好。虽然从检验值来看, 预测值与实际数据非常吻合, 但从模拟数据来看, 刚开始精度很好, 但越往后精度变化越来越大, 如果数据量太大, 预测效果可能会减弱, 为了提高精度, 应随着数据的增多而不断修正预测模型, 以提高预测精度。
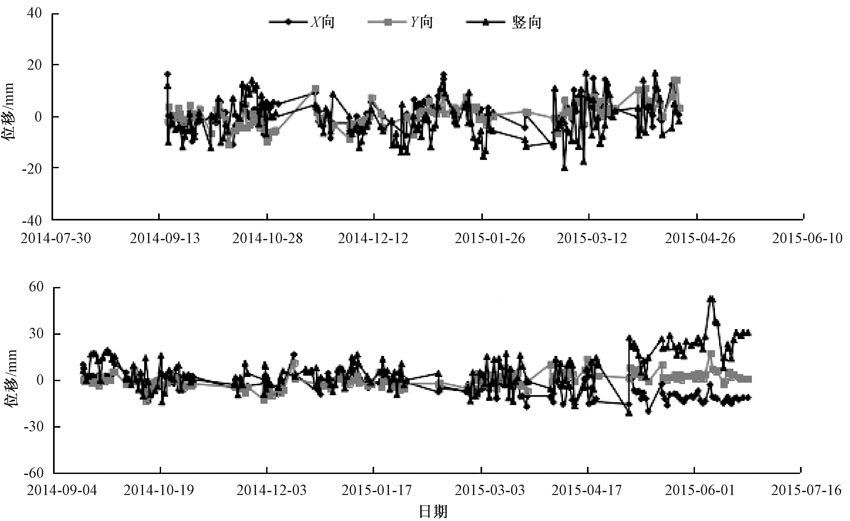 | 图2 测点2、5位移分量变化过程线 |
| 表3 GM(1, 1)模拟值与实测值 |
本研究表明, GNSS技术完全可以运用到地势较为险峻的地方, 且不需要通视, 接受信息多, 可获得高精度的观测数据, 能够弥补传统监测方法的不足, 具有较好的应用前景。GNSS监测点的位移变形量都在精度范围内, 属于正常变形。在GNSS技术支持下, 利用灰色预测模型GM(1, 1)对滑坡区部分时间段的位移变形量进行预测, 得到的检验值均在精度允许范围内。但若要将GM(1, 1)模型应用到样本较多的实验中, 仍需要不断修正模型。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|